K. Holz, D. Maturana, and S. Scherer.
Learning a Context-Dependent Switching Strategy for Robust Visual Odometry.
In FSR. 2015.
[ .bib ]
[ .pdf ]
Abraham Bachrach, Samuel Prentice, Ruijie He, Peter Henry, Albert S. Huang, Michael Krainin, Daniel Maturana, Dieter Fox, and Nicholas Roy.
Estimation, planning, and mapping for autonomous flight using an RGB-D camera in GPS-denied environments.
I. J. Robotic Res., 31(11):1320–1343, 2012.
[ .bib ]
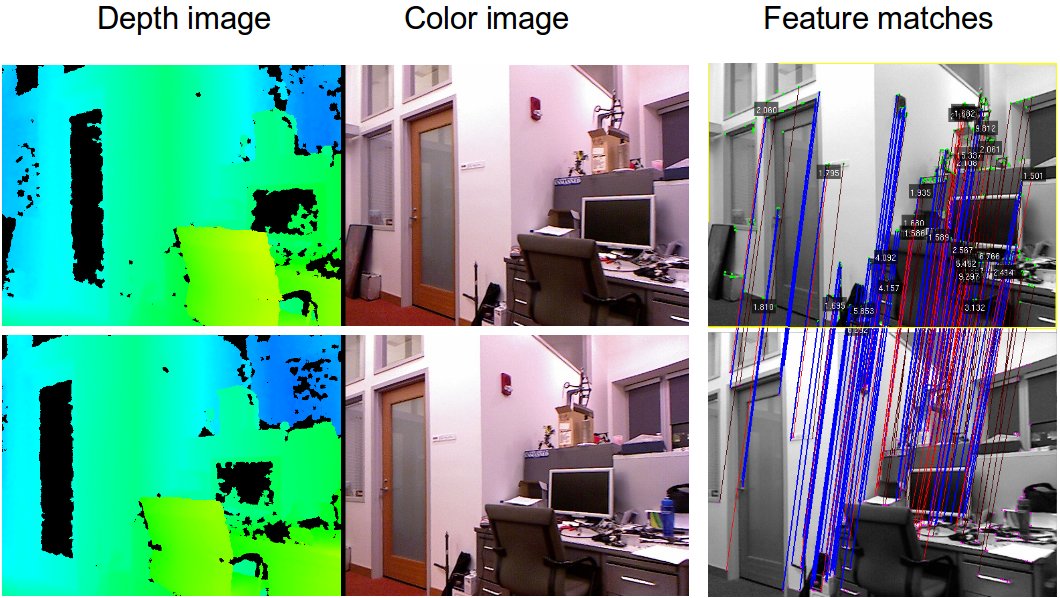
A. Huang, A. Bachrach, P. Henry, M. Krainin, D. Maturana, D. Fox, and N. Roy.
Visual odometry and mapping for autonomous flight using and RGB-D camera.
In International Symposium of Robotics Research (ISRR). 2011.
[ .bib ]
[ .pdf ]