VoxNet | 3D Convolutional Neural Networks
code: github.com/dimatura/voxnet
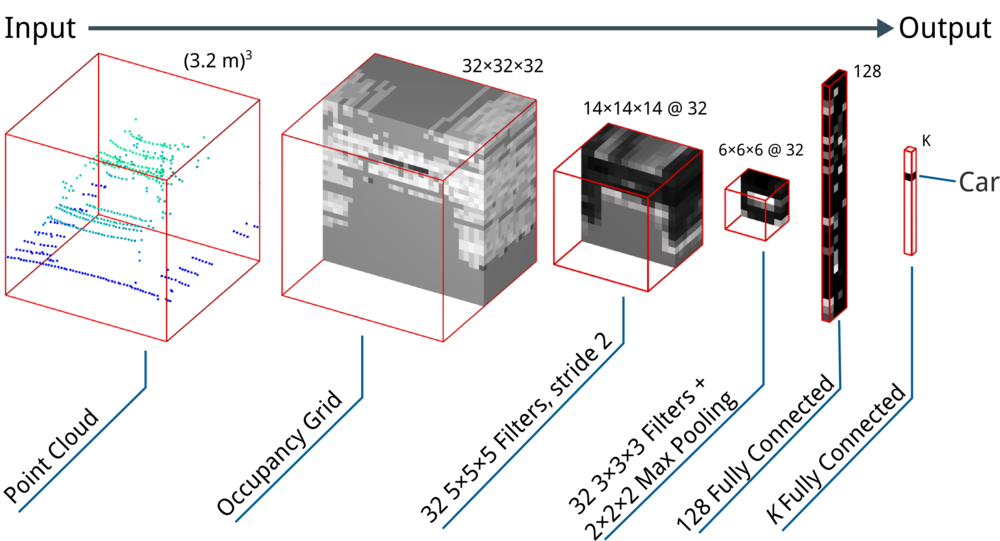
Convolutional Neural Networks have largely replaced the traditional "preprocessing -> features -> classifier" pipeline for object recognition and other tasks in computer vision. Can we do the same for analogous tasks using range sensors such as LiDAR? We propose a framework integrating columetric Occupancy Grids with 3D Convolutional Neural Networks. Unlike previous 2.5D approaches based on depth images, our approach is fully volumetric. Our results show that this framework obtains state-of-the-art accuracy at high speeds, mirroring results in computer vision.